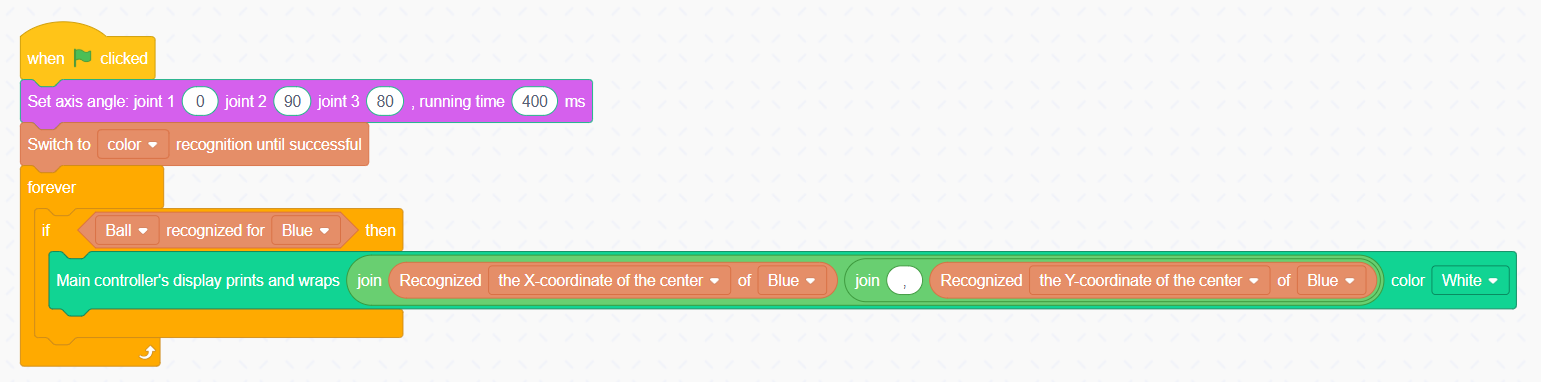
Na ilustracji znajduje się blok instrukcji:
- Ramię ustawiane jest w górze – upewniamy się, że nie zasłania obrazu rejestrowanego przez kamerę.
- Ustawia tryb AI na rozpoznawanie kolorów – w tym trybie obraz rejestrowany przez robota podlega interpretacji AI.
- W nieskończonej pętli:
- jeżeli tylko rozpoznano niebieską piłkę, to:
- na ekranie dotykowym robota, wypisywane są współrzędne środka znalezionego w kadrze obiektu (niebieskiej piłki)
- jeżeli tylko rozpoznano niebieską piłkę, to:
Zadanie:
- Zamień blok 'if’, na blok 'if…else’, dodaj instrukcje, które dadzą znać za pomocą świateł robota, że piłka jest w kadrze – stałe niebieskie światło, oraz, że robot nie może znaleźć piłki – migające czerwone światło.
- Kategoria „Sound and Light” (różowa)
- Instrukcja „Main controller’s light display”
- Kategoria „Sound and Light” (różowa)
- Zaprogramuj robota tak, aby w razie braku piłki w kadrze starał się ją znaleźć, obracając się w miejscu. Nie zapomnij dopisać instrukcji, która zatrzyma obrót, jeżeli piłka się znajdzie.
- Kategoria „Motion” (fioletowa), sekcja „Mecanum wheel car”
- Instrukcja „Mecanum wheel car | turn ____ in place |”
- Instrukcja „Mecanum wheel car stop”
- Kategoria „Motion” (fioletowa), sekcja „Mecanum wheel car”
- Zapisuj wyświetlane współrzędne do zmiennych. Dodaj nowy blok z zieloną flagą, w takim przypadku kliknięcie Flagi w prawym dolnym rogu strony, spowoduje uruchomienie obu bloków kodu. Niech nowy blok w nieskończonej pętli odczytuje zapisane zmienne i stara się obracać robota w stronę piłki.
- Kategoria „Variables” (pomarańczowa)
- Podpowiedź:
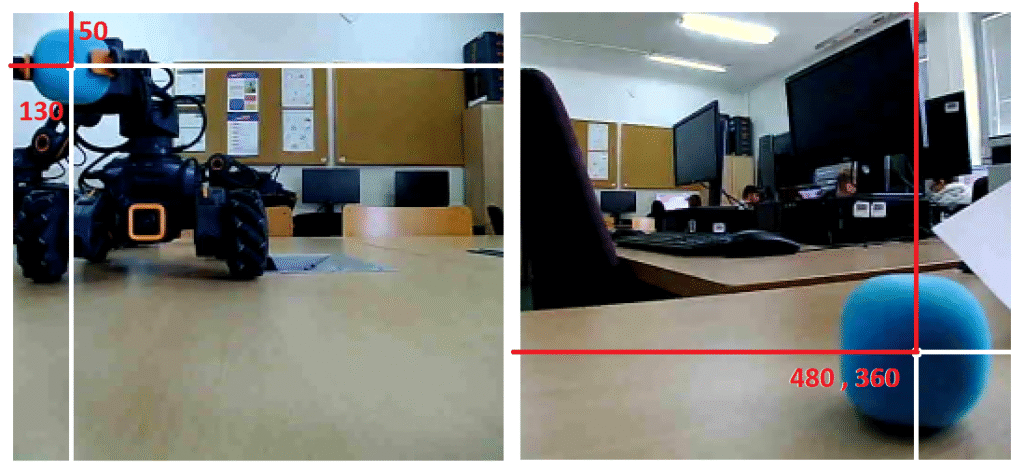
- Sprawdź współrzędną X na ekranie, kiedy piłka jest po środku kadru.
- Kiedy współrzędna jest sporo większa, to obracaj robota w prawo, kiedy współrzędna jest sporo niższa, to obracaj robota w lewo.
- Nie zapomnij zatrzymać obrót, kiedy piłka jest blisko centrum.
Podpowiedź, jak interpretować wyświetlane przez robota wartości: